Algebraic surfaces
Abstract.
This document includes notes for a 16-hour TCC course I taught in the autumn of 2024 on algebraic surfaces. None of this content is original to me. Almost all the facts here can be found in the excellent texts by Beauville and Reid. The goal is to state the Enriques–Kodaira classification in characteristic 0. Of course, any errors here should be marked down to me.
1. Some motivation
Standing assumption.
is an algebraically closed field of characteristic . You will lose absolutely nothing by assuming .
This course is ostensibly about birational geometry (though probably we’ll spend more time on other stuff). In particular, we are really want to understand the function field where is an irreducible variety.
Definition 1.1.
If , are irreducible varieties, we say that and are birational if .
Question 1.2.
Given irreducible varieties over , can we tell if and are birational?
We want to associate invariants (i.e., numbers) to and which allow us to tell them apart. The first one you probably already know.
Definition 1.3.
If is irreducible, the dimension of is the transcendence degree of .
It is clear that the dimension is a birational invariant. We break down by dimension.
1.1. Dimension 0
Over an algebraically closed field there is nothing to say about points, they’re points.
1.2. Dimension 1
We will need to say a lot about curves to study surfaces. Let be an irreducible variety of dimension . There is a very useful fact about curves
Lemma 1.4.
There exists a unique smooth projective curve birational to .
From the lemma, to study curves up to birational equivalence it suffices to study smooth projective curves up to isomorphism! This is very convinient. In particular we have a very nice isomorphism invariant (if ).
Definition 1.5.
Define the geometric genus of to be the genus of the associated Riemann surface .
![[Uncaptioned image]](x1.png)
Remark 1.6.
Actually, it really is enough to define the genus over . The field of definition of has finite transcendence degree over (even if is huge, is cut out by finitely many equations on finitely many affines) and therefore embeds in . This is an example of the Lefschetz Principle.
In any case, we’ll later see how to define the genus without reference to the Riemann surface .
The genus is a really good invariant. One reason is that for each there exists an irreducible variety of moduli whose -points are in bijective correspondence with -isomorphism classes of curves of genus .
1.3. Dimension 2
I am claiming that we can do an entire course on this case, so hopefully it’s quite a bit harder. Here’s a bunch of questions:
Question 1.7.
Let be an irreducible variety of dimension :
-
(1)
Can we tell if ?
-
(2)
Does there exist a “good” choice of model for ?
-
(3)
Can we get a “curvature trichotomy”-esque invariant?
The answer is yes (Castelnovo’s rationality criterion), yes (in the non-ruled case we have the minimal model), and yes (the Kodaira dimension).
2. Housework
Let be an irreducible variety (in particular is also reduced). Let be any open affine subvariety of i.e., so that for some -algebra . Since is irreducible (and reduced) the ring is an integral domain. The function field of is defined to be the fraction field of .
Remark 2.1.
If you prefer to minimise scheme words, you could find so that is a Zariski open subset of and then take
Definition 2.2.
Let be a smooth irreducible variety. A Weil divisor is a finite formal sum
where the sum ranges over prime divisors (closed irreducible subvarieties of codimension ). Write for the free abelian group supported on the prime divisors.
We say is effective (written ) if for all .
A note on sketches.
I am not a capable artist, and this is evidenced by the fact that I cannot accurately draw -dimensional manifolds over . I compromise by drawing the real points of complex surfaces. Similarly, I am bad at drawing open sets in the Zariski topology – you will have to re-imagine my usual-complex-topology open sets.
![[Uncaptioned image]](x3.png)
If is a prime divisor we can choose some open affine for which , say . Then is isomorphic to a closed irreducible subvariety of and therefore we have for some prime ideal (i.e., is cut out by the polynomials in ). Since has codimension the ideal has “height 1” and therefore the local ring
is a DVR and comes equipped with a discrete valuation
which then extends to a valuation
which “picks outthe order of vanishing of a rational function along ”.
Example 2.3.
Take and . For each let . We have and picks out the power of in the numerator of . Thus
At we have to use the transition functions. Take . Then we have , so that .
Exercise 2.4.
More generally let and let be a homogeneous polynomial of degree . Take , let , and let be the hyperplane at infinity. Show that
Remark 2.5.
Often people write where is the generic point of and is the stalk of the structure sheaf at .
Exercise 2.6.
Check that the preceding definitions do not depend on the choice of open affine.
Definition 2.7.
For define the divisor of zeroes and poles of
We say that a pair of Weil divisors are linearly equivalent (write ) if for some .
Definition 2.8.
If is a smooth, projective, irreducible variety we define the Picard group . For a Weil divisor we write for the class of in .
Remark 2.9.
The experts will notice that I’ve imposed enough assumptions in the previous definition to ensure that Cartier divisors talk to linear equivalence classes of Weil divisors, if is subject to fewer hypotheses (in particular if you need to relax smoothness) you should be more careful.
Example 2.10.
Exercise 2.11.
Show that generated by and .
![[Uncaptioned image]](x4.png)
2.1. Differentials and canonical divisors
The goal is to pluck out a “canonical divisor” of a projective variety . Here there is an incomplete treatment but please see Shafarevich’s book [5, Chapter 3.5] for something much better.
Try 1: Try the divisor for some . This is no good, because we’ve already used this to define linear equivalence.
![[Uncaptioned image]](x5.png)
Try 2: Consider some projective embedding , and take a hyperplane section. This is ok, but it depends on the extrinsic data of an embedding.
Try 3: Differentials.
Definition 2.12.
A rational -form is an expression
subject to the Leibniz rules
-
•
for all ,
-
•
for all ,
-
•
for all .
We write for the -module of rational -forms.
Lemma 2.13.
If is a transcendence basis for , then is generated as a -module by .
Proof.
Exercise. ∎
Example 2.14.
-
(1)
so that . Then .
-
(2)
. Then .
-
(3)
. Then .
2.1.1. Canonical divisor on a curve
Start with curves (irreducible dimension varieties).
Definition 2.15 (Divisor of a -form on a curve).
Let be a smooth projective curve and non-zero . For each choose non-constant so that (a “uniformiser”), then for some . Define and
Example 2.16.
Let and . For all we have so that for all . At we have . In particular and .
This seems pretty promising (it’s at least not linearly equivalent to !).
Definition 2.17.
Let be a smooth projective curve. A canonical divisor for is any divisor of the form for some non-zero .
One should very much hope that this divisor is actually well defined… good news.
Lemma 2.18.
Let be a smooth projective curve. The linear equivalence class of does not depend on the choice of rational -form.
2.1.2. More general
An important input in Definition 2.17 is that by Lemma 2.13 there is a -dimensional space of -forms on a curve. We need to get that back when the dimension is . The idea is to take top wedge powers.
Recall that if is a vector space, for each we have
where . The following properties are very useful when you want to compute anything with -forms.
Proposition 2.19.
We have:
-
(1)
if and only if are linearly dependent,
-
(2)
for a transposition we have , and
-
(3)
if then and is spanned by for any basis of .
Corollary 2.20.
If then the space of rational -forms is a -vector space of dimension .
With Corollary 2.20 in our pocket, we are in with a shout of being able to define something reasonable as a canonical divisor.
![[Uncaptioned image]](x6.png)
To get to another -form we only need to multiply by a rational function – so any good definition of divisor of an -form will make two divisors-of--forms differ by the divisor of a rational function!
Let be a smooth, irreducible, projective variety of dimension . Recall that at a point we say are local coordinates at if span the cotangent space (where here is the maximal ideal of the local ring ).
Example 2.21.
If and is the origin, then where . In particular the coordinates are local coordinates.
Now take , a non-zero rational -form. Let be a prime divisor and choose to be local coordinates for at (any point in) an open for which . Further suppose that are regular on (we can always achieve this by shrinking if necessary). Then by Corollary 2.20 for some rational function . We define
Remark 2.22.
In practice, to compute the valuation of along every prime divisor one only needs to cover with finitely many open sets because is quasi-compact in the Zariski topology.
Exercise 2.23.
The definition of above does not depend on the choice of open set , nor the choice of local coordinates .
Hint: cover in open affines (one for each point, and small enough so that your favourite local coordinates on each are regular) and compare pairs of volume forms and by showing that the Jacobian determinant is non-vanishing and regular on overlaps.
Definition 2.24.
Let be a smooth, irreducible, projective variety and let be a non-zero rational -form. We define the divisor of to be
where the sum ranges over the prime divisors of .
Of course, the first thing we should show is the important lemma.
Lemma 2.25.
Let be a smooth, irreducible, projective variety. Then linear equivalence class of the divisor of a rational -form does not depend on the choice of . We call a canonical divisor on .
Example 2.26.
Let , write and . Take . Now clearly has no zeroes or poles on the patch with . Then swapping patches by setting and so that and we have
Therefore writing we have and therefore . In particular .
Actually this is more general.
Lemma 2.27.
We have where (or any hyperplane, for that matter).
Proof.
Exercise, follow your nose as above. ∎
Exercise 2.28.
Show that if then where and .
Again, there is a more general form of Exercise 2.28.
Lemma 2.29.
Let and let be the projection onto the factor, then .
Proof.
Exercise. ∎
Remark 2.30.
Later we will prove the adjunction formula (Theorem 5.9) which will allow us to get a canonical divisor on a complete intersection by making adjustments, then intersecting with subvarieties.
3. Curves
By a smooth curve I mean a smooth irreducible (reduced) projective variety of dimension . Remember, the question we’re asking is:
Question 3.1.
How do we distinguish curves?
Try 1: Consider the space of everywhere regular rational functions . But there is the well known lemma.
Lemma 3.2.
Let be an irreducible proper (e.g., projective) variety. Then .
So unfortunately this can’t give us a good number.
Remark 3.3.
When and one should compare this to Liouville’s theorem (every bounded holomorphic function is constant – bounded means there is no pole at infinity). More generally when one can use compactness and the maximum modulus principle.
Try 2: Let be a Weil divisor on . Consider the space
of rational functions with “poles allowed by and zeroes forced by ”. From this we can get a number, namely (in general little is the dimension of big ).
Example 3.4.
Let and take . Then
In particular (the number of monomials).
Try 3: The problem with try 2 is of course that we have to name a divisor. But we have a way to do that!
Definition 3.5.
Define the geometric genus of to be .
Example 3.6.
Take . Then we know . Then because we’re asking for those everywhere regular functions (i.e., constants) which have (at least) a double zero at infinity. That’s enough to make anyone zero.
Example 3.7.
Take to be a smooth cubic curve in . By the adjunction formula Theorem 5.9 we will see that . Thus by Lemma 3.2 we have .
3.1. The Riemann–Roch theorem
We now state the Riemann–Roch theorem, which is a powerful tool for computing the dimensions for divisors on a smooth projective curve .
Theorem 3.8 (Riemann–Roch).
Let be a divisor on a smooth irreducible projective curve . Then
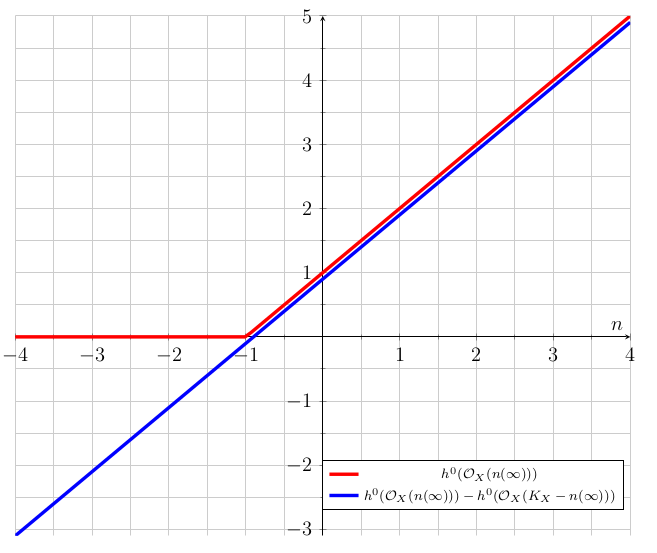
Example 3.9.
Continuing from Example 3.6 we know that whenever . But Riemann–Roch tells us that this should continue to happen when so long as we correct by the term . But we have so this dimension is where . Whenever we get (as we want). When we get that both and are zero (as required, again). This example is illustrated in Figure 2.
Remark 3.10.
The point is that the correction term makes the dimensions “behave like linear functions in the degree”. Later we will see that this is really some manifestation of the Euler characteristic being the “right” thing to use in exact sequences when we want to find dimensions.
Often Riemann–Roch is best used in the form of the following corollary.
Corollary 3.11.
We have:
-
(1)
,
-
(2)
,
-
(3)
if then .
Proof.
(1) is clear. For (2) take then Riemann–Roch implies that and the claim follows. For (3) combine (1) and (2) to obtain the bound . ∎
I’ll conclude with a standard example of how to use Riemann–Roch.
Lemma 3.12.
Every genus curve (over an algebraically closed field) is isomorphic to a smooth cubic curve in .
Proof.
You can find something like this in [7, III]. Take a point (this is the only place we use the algebraic closure, actually). Now by Corollary 3.11 we have and therefore we can compute
But if we choose a basis then each of the homogeneous degree monomials in lives in (count the poles). In particular, there is a relation of degree between .
Thus the rational map given by lands on a cubic curve .
Exercise 3.13.
Check that is in fact an isomorphism.
∎
Exercise 3.14.
Use a similar trick to show that every genus curve is isomorphic to an intersection of two quadrics in . Hint: consider and .
4. Sheaves and stuff
This is not a course about sheaves, it’s more about using them. As such, I’m going to give a bunch of examples and if this section makes no sense at all, that’s ok. Anything I state you’re welcome to take as an axiom until you want to read Hartshorne. I quite like the short treatment in Reid’s notes [4, Chapter B], and I follow it relatively closely.
Example 4.1.
Let be an irreducible variety and take an open subset.
-
(1)
The structure sheaf so that
-
(2)
If is smooth the sheaf for a Weil divisor so that
-
(3)
If is smooth the sheaf of regular -forms so that
where regular means that there exist regular so that .
-
(4)
If is smooth the sheaf of regular -forms so that
where regular means that there exist regular so that .
-
(5)
If is smooth, the canonical sheaf .
Obviously the are rings, all the others are merely abelian groups. But actually, (2)–(4) are naturally -modules.
Definition 4.2 (Sketch definition).
A sheaf of “foos” on a variety is some assignment which takes in open sets and spits out “foos” i.e., (here “foos” are say sets, rings, abelian groups). To be a sheaf, there is additional data to make sure our sheaf encapsulate “function-ness”.
-
Restriction:
Given open sets there exist a restriction map which staisfies the condition that if then we have .
Slogan: If you’re restricting the domain of a function it doesn’t matter if you first restrict a little less. -
Gluing:
If you have something that looks like a function on an open cover of , then it glues to a function on and you know it uniquely.
Exercise 4.3.
-
(1)
Look up the actual definition and check that my bad sketch is correct.
-
(2)
Come up with the definition of a sheaf of -modules (you want the restrictions to behave with the structure).
-
(3)
Come up with the definition of locally adjective.
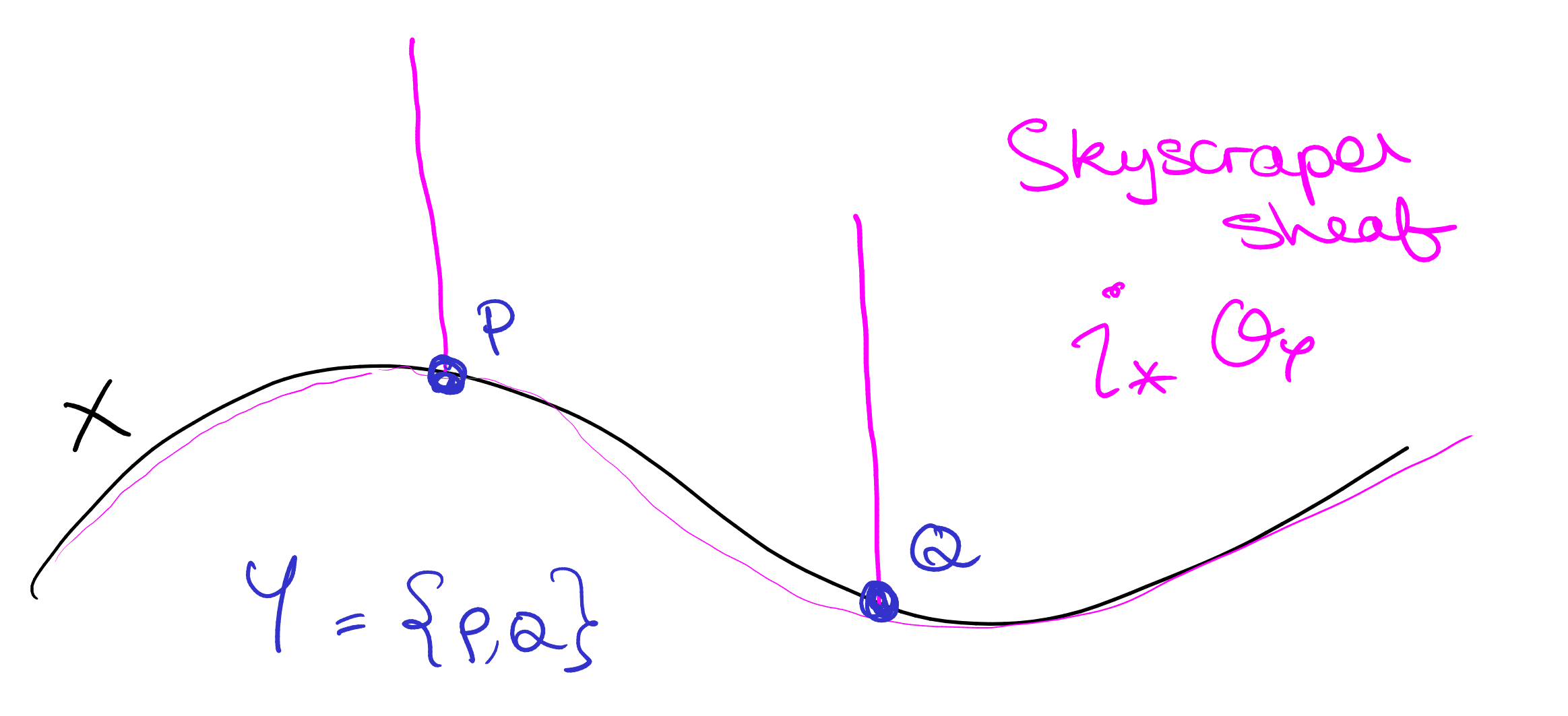
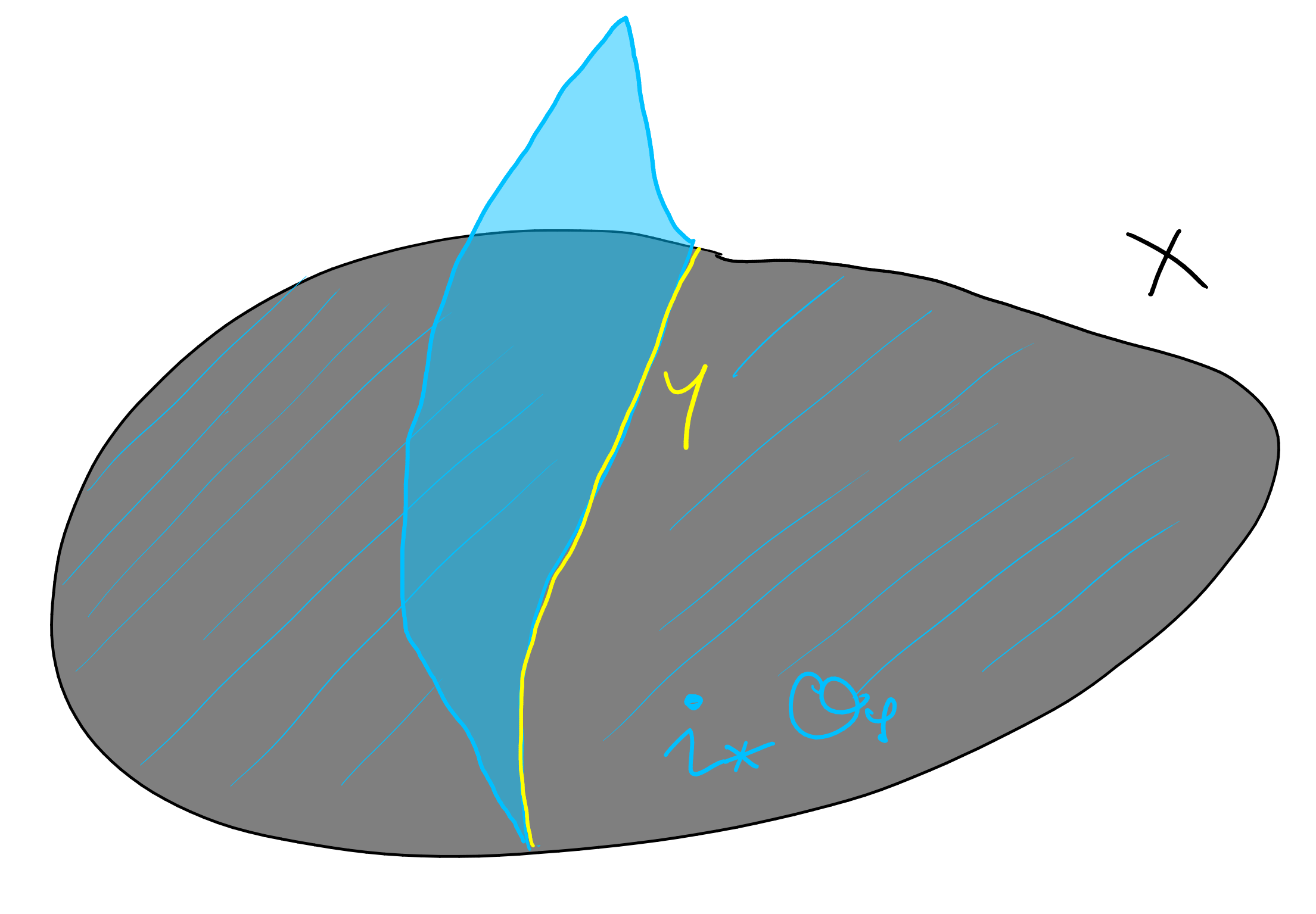
Example 4.4 (Pushforward).
Let be a subvariety. We can “push-forward” a sheaf on to a sheaf on by defining
I like to think of this as a kind of “-function” supported along .
A typical example of this is the skyscraper sheaf. Take a finite set of (closed) points and consider . Since just counts the number of points in one can think of as some kind of indicator function for containing elements of . The name “skyscraper” comes from the vision on stalks – we get a at the stalks and trivial everywhere else.
Exercise 4.5.
Figure out what the skyscraper sheaf looks like when some of the points are non-reduced.
Exercise 4.6.
Define pushforward for any morphism (not just immersions).
We get to stalks. One should imagine this as the “algebraic-geometry-version-of-Taylor-series-expansions-of-holomorphic-functions”. That is, some kind of “very local” view of a function.
Definition 4.7.
Let be a sheaf on a variety . For a point (here this could be a scheme-theoretic point i.e., non-closed) then the stalk of at is defined as
If this is intimidating, not to worry, you can take the following lemma as a definition.
Lemma 4.8.
Let be a variety and let be a sheaf of -modules. Then for any affine open . Identify with a prime ideal , then
the localisation of at .
Exercise 4.9.
Define and quotients for sheaves. If you haven’t seen this before you’ll probably get it wrong, not to worry – this is a feature not a bug. The point is that we want these things to “look correct” on stalks, but then we may have to add in some “extra” sections to get the gluing to work.
Anyway, even if you don’t do the exercise the following should hopefully provide some orientation.
Proposition 4.10.
Let be an irreducible, smooth, projective variety and let be Weil divisors on :
-
(1)
if and only if ,
-
(2)
,
-
(3)
if is a canonical divisor on then .
4.1. Exactness
The point here is that exactness is “hyper-local” in the sense that we want to be able to check it on stalks. Why not define it that way then!
Definition 4.11.
A sequence
of sheaves of abelian groups on is exact if for every the induced sequence
of abelian groups is exact.
Example 4.12.
If we include a point in a curve we have an exact sequence
It suffices to check this stalk-locally. If (closed) this is clear, since and . If then is the unique maximal ideal in and .
You will not lose much in this course if you take the following lemma only with closed subvarieties (i.e., no reduced structure).
Lemma 4.13.
If is a closed subscheme of a variety then we have a short exact sequence
In particular, is smooth, projective, and irreducible then if is an effective divisor we have a short exact sequence
where here we are abusively identifying and the corresponding pure codimension subscheme in (which is non-reduced if and only if for some ).
Proof.
Exercise, just check it on stalks. ∎
4.2. The failure of surjectivity
It turns out that when we take global sections, right exactness is not preserved. Let’s see a couple of examples.
Example 4.14.
Let and consider and let . Then is the skyscraper sheaf supported on and . We have a short exact sequence
But if we take global sections we have
This clearly cannot be surjective! The failure on the right is coming from the “error term” appearing in Riemann–Roch (the term ).
Exercise 4.15.
Generalise Example 4.14 to more general curves . Give a necessary and sufficient condition on for the failure to occur.
Example 4.16.
I’ve borrowed this out of Reid’s notes. Take with and take distinct points . Suppose for simplicity that (for this example, we’ll be happy to move our hyperplane in its linear equivalence class anyway). Take to be the three point variety . We have the ideal sheaf exact sequence
The setup of this example is to tensor this exact sequence with – this tensoring preserves exactness by the global version of “free modules are flat”. So we have:
| () |
I want to try describe the terms and the maps.
-
:
A section is a “linear form” – a rational function of the sort where is linear.
-
:
This is . Then is exactly the set of linear forms which vanish on . The map is just inclusion.
-
:
This is isomorphic to because does not meet .
-
:
We have . The map says to take some function and evaluate it on , , and .
One can also see exactness of visually (without 4.13). Just go to a small enough affine open.
But now we want to take global section in . Then we get
Now this is right exact so long as there is not an unexpected linear dependency – i.e., if they lie on a line! In the language of cohomology if our three points are colinear. All of this is controlled by an exact sequence
4.3. Cohomology of coherent sheaves
The idea for “fixing” these right exactness issues is to consider exact sequences of cohomology groups instead. We’ll probably only use these tools in the setting of coherent sheaves which is a certain “finite presentation” condition on -modules which allows a lot of theorems to work. At least in our setting of a variety being coherent is the same as admitting a cover by open sets for which
To be quasi-coherent is a weakening of this where we don’t just allow finite direct sums, but direct sums over any horrible index set. Anyway, if you like, you can take the following theorem as an axiom.
Theorem 4.17.
Let be a variety and let be a (quasi-)coherent sheaf on . Then there exist -vector spaces which satisfy:
-
(A)
Global sections: interpolates (i.e., ).
-
(B)
Functoriality: a morphism induces .
-
(C)
Long exact sequence: If we have a short exact sequence
then we can extract a long exact sequence
-
(D)
Affines: If is affine then for all .
-
(E)
Dimension: If is irreducible and then for all .
-
(F)
Finite dimensional vector spaces: If is proper (e.g., projective) and is coherent then for all .
-
(G)
Serre vanishing: If is a closed subvariety, is coherent, and is a hyperplane section of (i.e., is very ample) then there exists such that for all and we have (here ).
-
(H)
Serre duality: If is smooth, projective, and irreducible of dimension , then . For any line bundle there exists a perfect pairing
or if you prefer
In particular .
-
(I)
Euler characteristic: If is irreducible, projective of dimension , and is coherent we define the Euler characteristic of to be the alternating sum
Then is additive in short exact sequences i.e., if
is exact, then .
Remark 4.18.
Maybe most of this stuff shouldn’t be too surprising if you keep the goal in mind. Here’s some remarks to convince you that it is so.
-
(1)
Of course, if you were paying attention you should have noticed we have some obsession with attaching a number to varieties – in which case you will be very pleased to see that (F) allows us to get a number!
-
(2)
If you were paying even closer attention to the Riemann–Roch theorem you’ll remember some error term of the form – so you’ll be very suspicious of Serre duality.
-
(3)
The additivity of in exact sequences can be viewed as some “corrected” version of the dimension (which would be exact if the was just an exact sequence of old-fashioned -vector spaces).
4.4. Sketch proof of Riemann–Roch using Serre duality
Sketch.
When Riemann–Roch is true by definition of the genus and the fact . The proof now goes by applying Serre duality to get adding and subtracting points.
We have the ideal sheaf exact sequence
and tensor with any invertible sheaf . Note that (this is clear when the support of does not contain , more generally replace with a linearly equivalent divisor whose support does not contain – more on this in 5.3).
By additivity of Euler characteristics we get (the second last equality is because the dimension of is ). Now Serre duality says that .
Exercise 4.19.
Prove .
The claim follows by induction (adding and subtracting points, as required). ∎
5. The adjunction formula
Let be a smooth irreducible variety.
5.1. The moving lemma and restriction
If is a prime divisor and is an irreducible subvariety which 1is not contained in then (where here I actually mean scheme theoretic intersection which adds appropriate multiplicities to intersections) is an effective divisor on which we denote and call the restriction of to . More generally if is a divisor on whose support does not contain we define .
Example 5.1.
If is a cubic curve and is a hyperplane which meets with multiplicity at an inflection point , then .
Remark 5.2.
This is a typical example of the abuse of notation which trades effective Weil divisors and closed subschemes of pure codimension (add multiplicity along components by taking a power of the ideal sheaf).
The moving lemma is a nice tool which allows us to restrict divisors (even ones which contain !) so long as we are willing to work up to linear equivalence (which we are of course).
Lemma 5.3 (Moving lemma).
Let be a smooth irreducible variety, let , and let be a closed subvariety. Then there exists a linearly equivalent divisor such that is not contained in the support of .
Proof.
This is borrowed from [3, Prop. 9.1.11]. It suffices to prove the claim when is a closed point, and therefore we may assume is affine. By writing with and effective, we are also free to assume is effective. But because is affine there is some which generates as an -module (it has rank ). But is exactly the rational function we need to adjust by, let . By construction as subsets of , and this is exactly what it means to be disjoint from the support of . ∎
![[Uncaptioned image]](x10.png)
Remark 5.4.
Let be a smooth projective variety and let be a smooth closed subvariety. Let be a linear equivalence class of divisors on . Let be a divisor whose support does not contain , then the restriction is a well defined linear equivalence class of divisors on .
Upshot.
When you’re given a divisor to restrict: move it, then restrict it.
Exercise 5.5.
Prove that .
Remark 5.6.
In light of this I may write (actually, this is a bit of an abuse of notation because this is a sheaf on but I don’t want to define the terms in which is a sheaf on , but anyway just pushforward if you landed on the wrong topological space).
Example 5.7.
Previously we had and a hyperplane. After choosing our favourite hyperplane, we are free to assume that does not meet . In particular as expected.
Example 5.8.
Let be a cubic curve. We have (where is an inflection point on – choose a hyperplane which passes through with muliplicity ).
Theorem 5.9 (Adjunction formula).
Let be a smooth projective irreducible variety and let be a smooth irreducible closed subvariety of codimension then we have
is an canonical divisor for . Equivalently,
Sketch proof. The idea is actually quite simple, what takes more effort is convincing yourself that the definitions are correct. We start with the tangent–normal exact sequence
![[Uncaptioned image]](x11.png)
In the setting of vector bundles, it is quite clear that this sequence is exact (and of course, we’re only checking exactness stalk-locally). Anyway, the dual of this exact sequence is really what we’re after, and we get
Linear algebra fact.
Let
be an exact sequence of finite free -modules of ranks , , and . Then there exists an isomorphism .
The linear algebra fact globalises, so taking top wedge powers we get an isomorphism . Now tensor both sides with so that . ∎
Remark 5.10.
The linear algebra fact is really just the fact that the determinant of a direct sum is the product of the determinants ( is spanned by the determinant form).
Let’s conclude this section with some nice applications.
Example 5.11.
-
(1)
Let be a smooth cubic curve in . Then and in particular is trivial.
-
(2)
Let be a smooth quadric intersection in . Then and
and thus
is again trivial.
-
(3)
Let be a smooth quartic curve in . Then .
-
(4)
Let be a smooth intersection of a quadric and cubic surface in . Then .
-
(5)
Let be a smooth quartic surface in . Then .
The examples in (1)–(2) are “elliptic normal curves”. A curve which satisfies the condition as in (3)–(4) are known as “canonical curves”. The example in (5) is a K3 surface – more on this later.
Exercise 5.12.
Use the adjunction formula to prove the genus-degree formula. If is a smooth curve of degree , then
We’ll see a different proof of this later (see Proposition 6.10).
6. Intersection theory on surfaces
Since we are finally doing surfaces we can start using [1, Chapter I] as the reference for this section. I also make quite some reference to [4, Chapter A].
Definition 6.1 (Intersection multiplicity).
Let be a smooth, projective, irreducible surface, let be distinct irreducible curves, and suppose that is a point. Let be local equations for (i.e., there exists an open set on which are regular and such that and ). The multiplicity of the intersection of and at is defined to be .
This section is dedicated to proving the following.
Theorem 6.2 (Intersection pairing).
Let be a smooth projective irreducible surface. There exists a bilinear pairing
such that:
-
(1)
For any pair of distinct irreducible curves intersecting with multiplicity , we have
More generally if are distinct and irreducible then is the number of intersection points of counting multiplicity.
-
(2)
For any and any , we have
i.e., descends to a pairing on .
Before we go about proving the intersection pairing exists, let’s see some typical consequences. First is Bezout’s theorem.
Corollary 6.3 (Bezout’s Theorem).
Let and be curves in of degree and respectively which do not have any common components. Then, counting multiplicity, the number of intersection points of and is equal to .
Proof.
We showed earlier that and where is any line in . In particular
But is linearly equivalent to any line (e.g., some line ). It is immediate that . ∎
Corollary 6.4.
Let and be curves in of bi-degree and respectively which do not have any common components. Then, counting multiplicity, the number of intersection points of and is equal to .
Proof.
We showed generated by and . In particular, and . Now is linearly equivalent to for any , so and symmetrically for . Thus
as required. ∎
6.1. Warm-up: The proof of Bezout’s theorem
Let and for some homogeneous polynomials with no common factors. We have an exact sequence of sheaves
As we know, taking global sections may not preserve right exactness, so we tensor with for some — Serre vanishing says that the resulting exact sequence of global sections is exact. Precisely, we have
and taking global sections we get
where is the space of homogeneous degree polynomials in . But now we can take dimensions (i.e., count monomials of degree ) in this exact sequence of vector spaces so that
as required. ∎
6.2. Constructing the pairing
Now, we could tensor with some very ample divisor (as in the proof of Bezout) and take dimensions, but this would depend on some choice of projective embedding. Instead we use out “dimension avatar” – the Euler characteristic. In particular, we have
| (6.1) |
Definition 6.5.
Let and be any two invertible sheaves on (equivalently and for some Weil divisors ). Then we define the intersection product of and to be
Sketch proof of intersection pairing.
By definition the pairing is clearly symmetric. The following lemma then follows by construction.
Lemma 6.6.
If and are distinct irreducible curves then the intersection product is equal to the number of intersection points of and counting multiplicity.
It remains to show that the pairing is bilinear. To do this, we use the following fact due to Serre.
Lemma 6.7 (Serre).
Let be a smooth projective surface. Let be a divisor. Then there exists a pair of smooth curves such that .
Sketch proof.
The hard part of the proof is to show that if is a very ample divisor on (a hyperplane section) then there exists an integer such that is a hyperplane section (of a different projective embedding of ). If you accept this, then we can write . The claim follows by noting that a generic hyperplane section of a smooth surface is a smooth curve. ∎
By the lemma it suffices to prove linearity of in the second variable assuming that is a smooth curve. Now, for any line bundle on we have an exact sequence of sheaves
given by tensoring the ideal sheaf exact sequence with . In particular, we have . We now apply this with and with so that
Then we have
But by the Riemann–Roch theorem this is equal to which clearly behaves linearly in . ∎
6.3. Riemann–Roch for surfaces and the genus formula
We now see that even if one cares only about curves, intersection theory provides some useful tools. In particular we have the following theorem.
Theorem 6.8 (Genus formula).
Let be a smooth, projective, irreducible curve on a smooth projective surface . Then we have
where is a canonical divisor on .
We will deduce the genus formula from the Riemann–Roch theorem for surfaces. However, the judicious reader will note the similarity of the genus and adjunction formula.
Exercise 6.9.
Deduce the genus formula from the adjunction formula
6.3.1. Some consequences of the genus formula
Let us first see some examples of the genus formula “in nature”.
Proposition 6.10 (Genus-degree formula).
Let be a smooth curve of degree . Then the genus of is equal to .
Proof.
Recall that for any line . Now by Bezout’s theorem (Corollary 6.3) we have and . In particular, by Theorem 6.8 we have
as required. ∎
Proposition 6.11 (Genus-degree formula for ).
Let be a smooth curve of degree . Then the genus of is equal to .
Proof.
Let . Recall that where and . Now by Corollary 6.4 we have and . The claim follows from Theorem 6.8. ∎
The following corollary is immediate from Proposition 6.11 and proves something you already suspected (there is a curve of every genus), but note that by the genus-degree formula, it is false for (not every integer can be written as ).
Corollary 6.12.
For every positive integer there exists a curve of genus .
6.3.2. Riemann–Roch for surfaces
We now state and prove the Riemann–Roch theorem for surfaces. Unlike in the case of curves, the “error term” which occurs in the Riemann–Roch formula must do some heavier lifting. In particular, it cannot simply measure since it must take in data coming from which does not speak to through Serre duality.
However, remember that the Riemann–Roch theorem in the case of curves states that . It is this formula which now arises.
Theorem 6.13 (Riemann–Roch for surfaces).
Let be a smooth, projective, irreducible surface and let be a line bundle (i.e., for some Weil divisor on ). Then we have
or equivalently
where is a canonical divisor for .
Proof.
Unsurprisingly, the proof uses Serre duality. Note that Serre duality implies that
for any line bundle on . We now compute
But now we have
as required. ∎
The genus formula can now be proved from the Riemann–Roch theorem.
Proof of the genus formula (Theorem 6.8).
Let be a smooth curve, and take the ideal sheaf exact sequence
Taking Euler characteristics we see that
| (6.2) |
Applying Theorem 6.13 we see
| (6.3) |
7. Blowups
This section is based primarily on [1, Chapter II], and every fact presented here can be found in more detail there. Let be a smooth projective surface and let be a point. Choose local coordinates at and let be an open set containing on which and are regular.
Definition 7.1.
Let be the surface defined by the equation
where are the coordinates on . We define the blow-up of at to be the pair where is the surface given by gluing to and is the natural morphism.
Remark 7.2.
The construction in Definition 7.1 works for smooth surfaces. More generally one does not need to be smooth – indeed this is often why one wants to blow-up, to resolve singularities. Even more generally we can define the blow-up of along an entire closed subscheme (not necessarily a point).
The following theorem follows easily from construction (except for uniqueness, which I leave as an exercise).
Theorem 7.3.
Let be a smooth projective surface and let be the blow-up of at and let . Then
-
(1)
the morphism is an isomorphism, and
-
(2)
the exceptional fibre is isomorphic to .
Moreover is unique up to isomorphism.
We start with some of the basic properties of the blow-up, after making a definition.
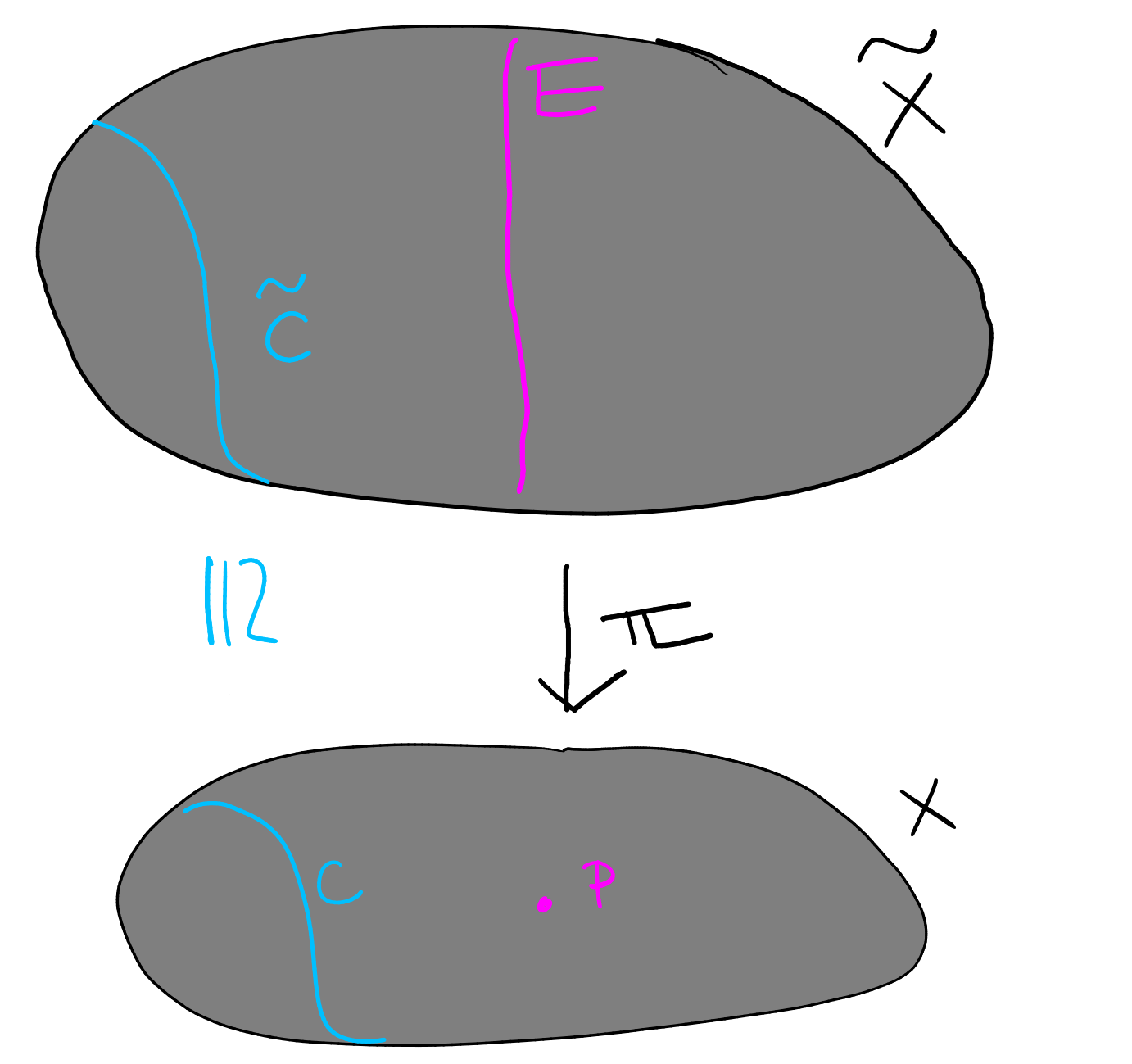
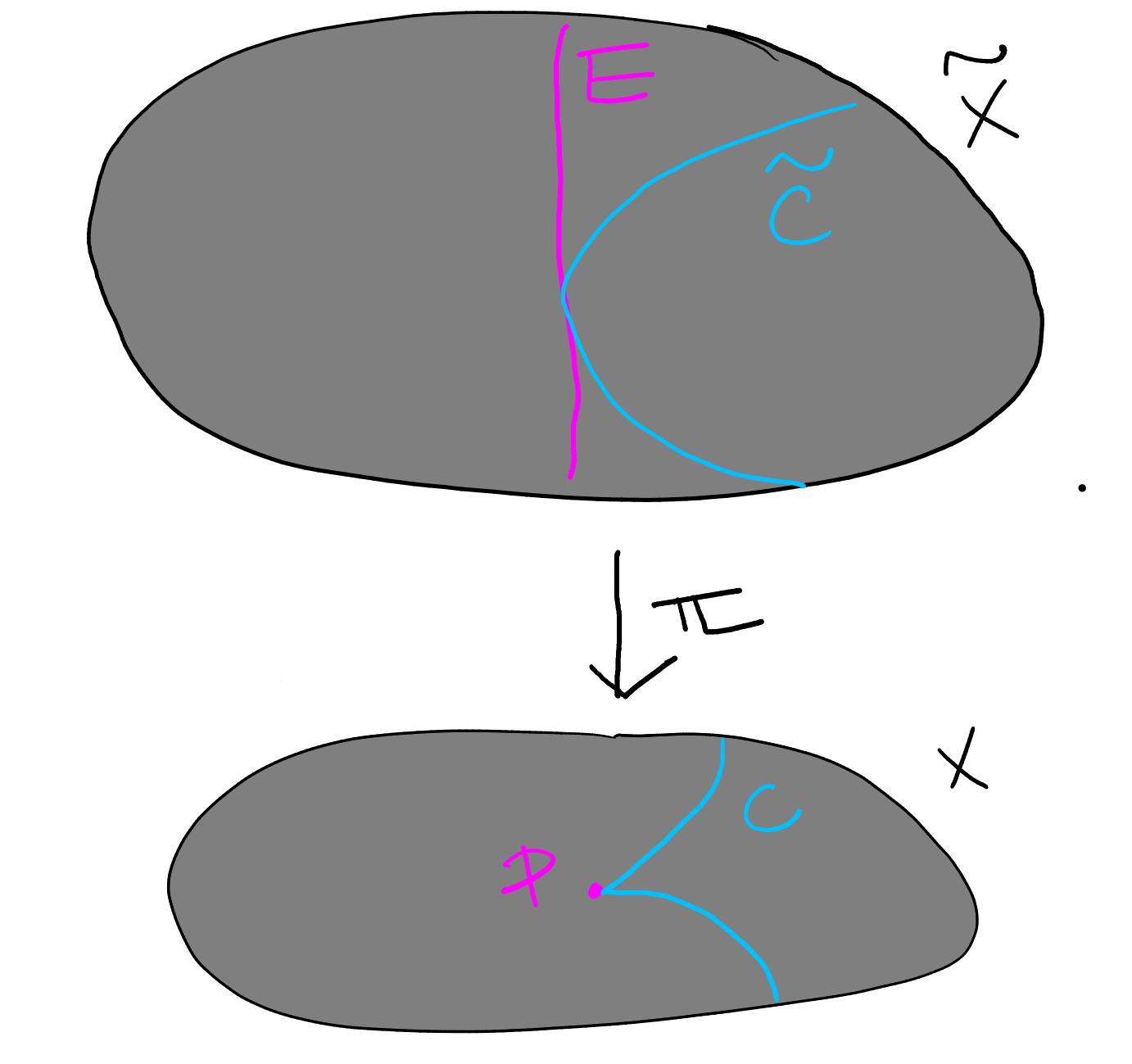
Definition 7.4.
Let be the blowup of at a point . Let be an irreducible (reduced) curve, and define:
-
(1)
the strict transform of to be the Zariski closure in , and
-
(2)
the total transform of to be the pullback .
We extend both constructions linearly to .
Lemma 7.5.
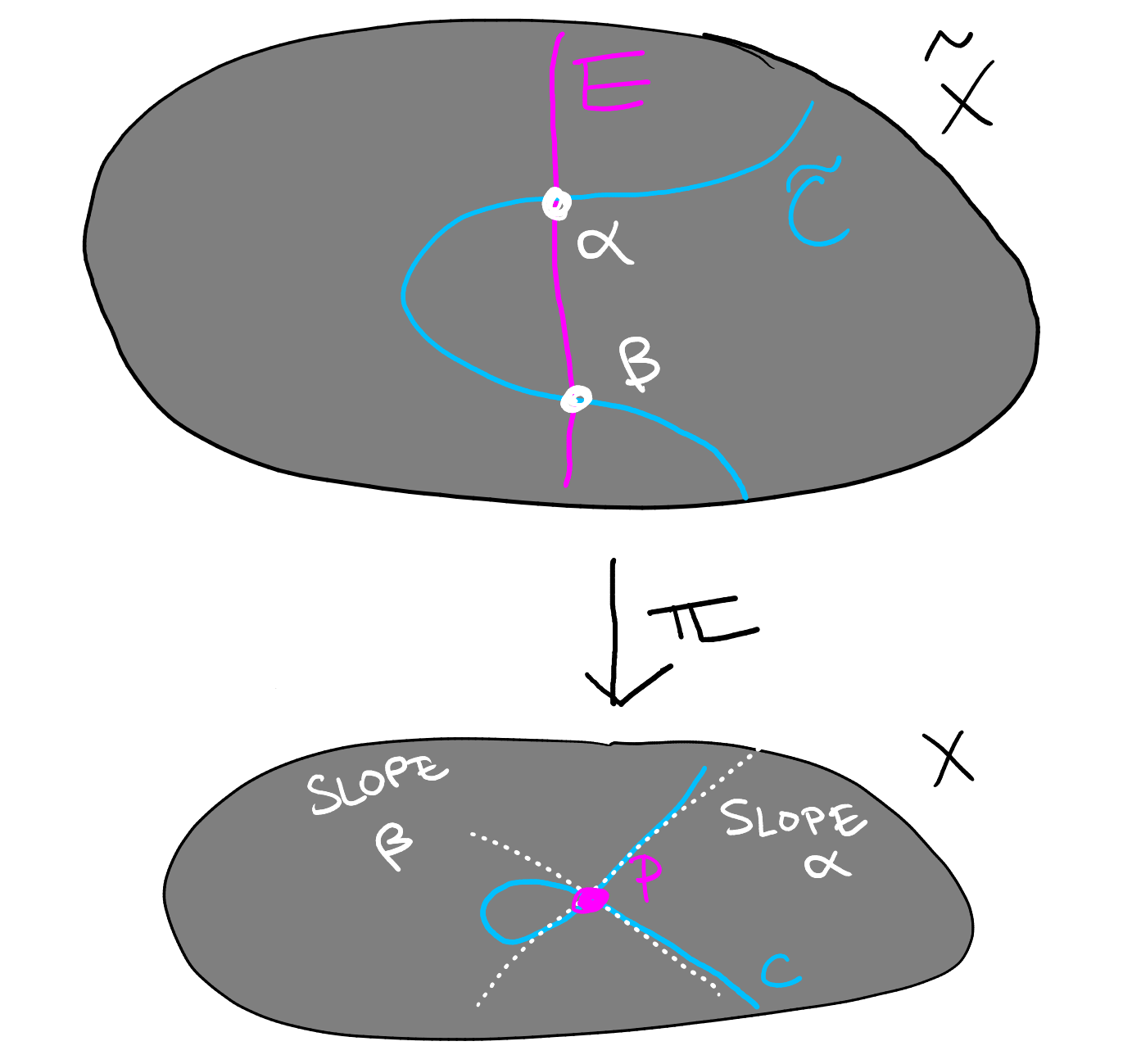
Let be a curve, and let be the multiplicity with which passes through , then .
Proof.
The idea is to work locally to see what happens with the pullback. First, note that for some integer . Continuing with the above notation, let be local coordinates at . In a neighbourhood of we have an equation for given by, say, . Now take a power series expansion in the completed local ring
where each is a homogeneous polynomial of degree in . Consider the local coordinates and at the point on (with the notation of Definition 7.1). By definition we have . Now we compute
because each polynomial is homogeneous of degree . But we then visibly see that . ∎
Proposition 7.6.
Let be the blowup of at a point and let be the exceptional divisor.
-
(1)
We have an isomorphism
-
(2)
For any we have .
-
(3)
For any we have .
-
(4)
The self intersection .
-
(5)
A canonical divisor on the blow-up is given by .
Proof.
The claims in (1)–(3) are clear when the support of and do not contain . But these properties are invariant under replacing divisors by an element of their linear equivalence class. Applying the moving lemma (5.3) we are free to assume that the supports of and do not contain .
7.1. Castelnuovo’s contraction criterion
Proposition 7.6 says that if we blow-up a smooth surface at a point the exceptional divisor is a -curve, that is and . There is a converse to this.
Theorem 7.7 (Castelnuovo’s contraction criterion).
Let be a smooth projective surface and let be a -curve. Then there exists a smooth projective surface together with a morphism such that:
-
(1)
is a point, and
-
(2)
is the blowup of at .
Vague sketch of the proof. Take some very ample divisor (a hyperplane section of some projective embedding ) and choose a basis . Now suppose that for some – this is not always the case, but it’s way easier to sketch the proof. Now choose so that is a basis. This gives a rational map
which is an embedding away from (since already gives a projective embedding of ). Since we chose so that it must be the case that has a pole along . But if the functions have a pole at it occurs to a lesser degree than that of . So for any point we have . In this way is contracted to a point.
Subtleties: There are a bunch of subtleties here, and this is why the proof in [1, Theorem II.17] is much longer than this.
-
•
To make sure that you can do this you should choose in such a way that (this can always be done by Serre vanishing). This way one can control using the ideal sheaf exact sequence together with and (and nice facts like ).
-
•
You may end up with way more ’s than just one (and if you don’t use them all you’ll get something singular) – this is a mild problem, it just requires some notation in order to define .
-
•
This just leaves the big issue of showing the image of is smooth. To get this you need to choose , though there is still a lot of work from here.
7.2. Elimination of indeterminacy
The following theorem shows that blowups are in a rigorous sense the “fundamental” birational transformations for smooth projective surfaces.
Theorem 7.8.
Let be a birational map between smooth projective surfaces and . Then there exists a smooth projective surface and a commutative diagram
such that the morphisms and are compositions of isomorphisms and blow-ups.
Proof.
Omitted, see [1, Corollary II.12]. ∎
8. Lines and
We now have the tools to prove the famous 27 lines theorem (we do have them, but we won’t prove it completely). What we will prove is 8.7, which says that the blowup of at points in general position is a smooth cubic surface containing exactly lines. This is a bit lame, since every smooth cubic surface is such a blowup, but we won’t prove it. Instead we settle for a rigorous “almost all”.
Theorem 8.1 (Cayley–Salmon, 1849).
Every almost all smooth cubic surfaces contains exactly 27 lines.
The basic idea of the proof of this theorem (which is not the Cayley–Salmon proof) is to recognise as the blowup of at points. The lines then come out of the blowup procedure. A slightly more general definition (which we will not use) is the following.
Definition 8.2.
A del Pezzo surface of degree is a blowup of at points in general position (i.e., no points are on a line and no are on a conic).
Lemma 8.3.
A del Pezzo surface of degree is isomorphic to a smooth cubic surface in .
Sketch proof. Let be 6 points in general position, and let be the blowup of at . Consider the vector space of cubic polynomials which vanish on and note that (there are cubic monomials and linear conditions). Choose a -basis and let
be the rational map induced by the natural map given by our choice of basis. The Zariski closure of the image of is clearly a cubic surface.
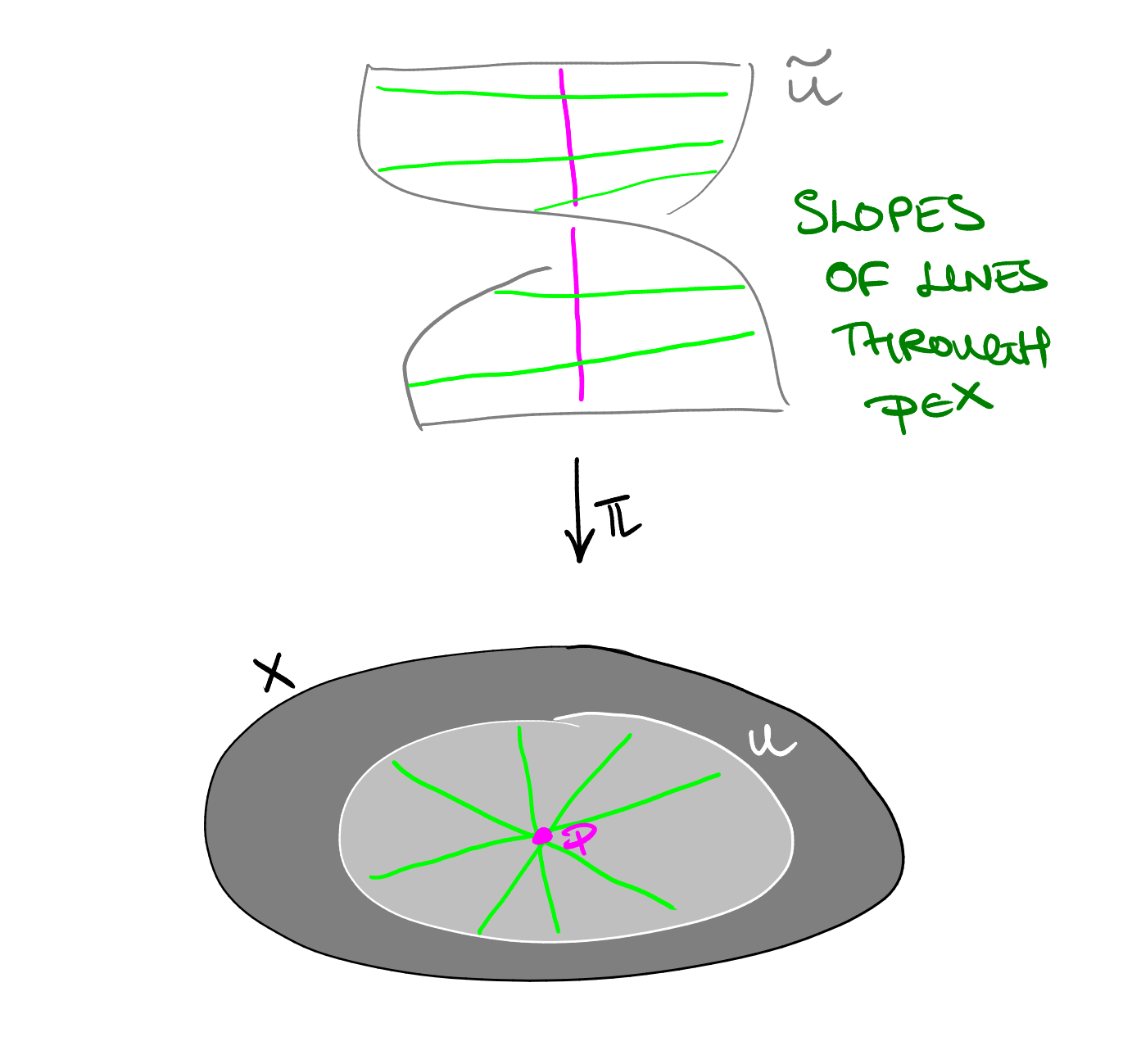
Exercise 8.4 (Hard, see [1, Prop. 4.9]).
Check that is an isomorphism onto its image by checking that separated points and tangent directions. To do this on the exceptional divisors construct explicit polynomials in which pick out the slopes at the points (the parameters on ) by using lines and conics through the .
Remark 8.5.
More generally than Lemma 8.3 a del Pezzo surface of degree is isomorphic to a smooth surface of degree in . Here by degree I mean that you should intersect the surface with two general hyperplanes and then count .
Lemma 8.6.
Let be a smooth cubic surface and let be a smooth irreducible curve, then if and only if is a line.
Proof.
By the adjunction formula Theorem 5.9 we have for any hyperplane . In particular we have . Choosing so that and counting intersections we see that if and only if is a line. Thus by the genus formula Theorem 6.8 we have if and only if is a line. ∎
Proposition 8.7.
Let be a cubic surface which is isomorphic to the blowup of at 6 points in general position. Then the lines on are exactly:
-
(1)
the exceptional divisors above the points ,
-
(2)
the strict transforms where is the line through and , and
-
(3)
the strict transforms where is the conic through each .
In particular contains lines.
Proof.
By Proposition 7.6 we have and for any line not containing for each .
Let be a line and suppose that for any . By the relation on Picard groups we may write and note that by Lemma 8.6 we have
| (8.1) |
Since the line was chosen so that we have for each and . Noting also that for each , by (8.1) we have
| (8.2) |
Now, each exceptional curve is a line (by Lemma 8.6) and is a line (by assumption) we have . Therefore the allowable combinations in (8.2) are:
-
there exist such that and for each , and
-
there exists such that and for each .
In the first case we have and in the second we have . ∎
8.1. Almost all cubic surfaces are the blowup of at points
Here is a cheap trick to show that almost all cubic surfaces are the blowup of at points in general position. This comes from [2, V.4]. For the actual result see [1, Theorem IV.13].
Proposition 8.8.
Every almost all cubic surfaces are isomorphic to the blowup of at points in general position.
Proof.
The argument is via moduli. We showed in Lemma 8.3 that every such surface is a smooth cubic surface, so we have a finite-to-one map
On the other hand we have that
Note that the conditions “not in general position” and “defining a singular surface” are Zariski closed on the ambient space. Therefore, to show that almost all cubic surfaces arise it suffices to show that the dimensions of the objects on the left hand side are the same.
To see this note that the dimension of is . There are cubic monomials in variables, so the dimension of the space of smooth cubic surfaces up to the action of is , as required. ∎
9. Cohomological invariants
We now introduce a bunch of useful cohomological invariants of smooth projective varieties.
Definition 9.1.
Let be a smooth projective algebraic variety of dimension . We define:
-
•
the geometric genus
-
•
the Euler characteristic of the structure sheaf
-
•
the arithmetic genus
-
•
the -plurigenus for
-
•
if is a surface we define the irregularity
By Hodge theory one has (you may see ).
Proposition 9.2.
The integers , , , , and are birational invariants of smooth projective surfaces.
Proof idea.
The basic idea for (and ) is to use two things:
-
(1)
Birational maps between proper (e.g., projective) varieties can be extended to a morphism on open subsets where has co-dimension in .
-
(2)
With the notation in (1) we have .
9.1. Examples of surfaces
We start with the “most obvious” example – a product of smooth curves.
Theorem 9.3.
Let and be smooth curves of genera and respectively. If we have
Proof.
We first make use of the Künneth formula ([8, Lemma 0BED]) which in our situation says that
In particular we have
But then (the second equality being Serre duality), and similarly for the other cases. ∎
Corollary 9.4.
There are infinitely many non-birational algebraic surfaces.
Proof.
Immediate from 9.2 and Theorem 9.3. ∎
Theorem 9.5.
Let be a smooth projective surface of degree , then
Proof.
We have the ideal sheaf exact sequence
Thus . Here is a super useful fact.
Lemma 9.6 (Hilbert polynomial).
Let be a smooth projective variety, then there exists a polynomial such that for all .
Now by Serre vanishing, for all we have
But note that this equality hold for infinitely many integers , so that for the Hilbert polynomial is
In particular, we have . Thus as required. It remains to show that , which we will not do. It follows from the fact that (Betti number) together with the fact that a projective hypersurface is simply connected (Lefshetz hyperplanes). ∎
Remark 9.7.
This is what you would naïvely expect, because we already know that degree , , and surfaces are rational (hence the ). One should compare with the genus-degree formula for curves (Proposition 6.10).
9.2. Kodaira dimension
Our final invariant is the Kodaira dimension, which measures “how well we can use to embed ”.
For some suppose that and choose a basis of rational functions . Define a rational map
Definition 9.8.
If for some we have , we define that Kodaira dimension of to be
If for all we define .
Some authors prefer rather than .
Example 9.9.
-
(1)
Take so that where is any hyperplane. Then
for all . So, as per the definition, we have .
-
(2)
Take to be an elliptic curve. Then and therefore
for all . Thus the map takes to a point and .
-
(3)
Take to be a smooth quartic surface. Then by the adjunction formula and as above . This clearly generalises to a smooth degree hypersurface in .
Exercise 9.10.
-
(1)
Show that if is a smooth projective curve of genus then .
-
(2)
Show that if is a smooth surface of degree then .
-
(3)
Show that if is a smooth surface of degree then .
9.3. The rationality criterion
If is a smooth projective curve, there is a cohomological criterion which allows us to tell whether or not is birational (isomorphic) to .
Lemma 9.11.
A smooth projective curve is birational to if and only if .
It is natural to wonder if having the same geometric genus as is enough to be a rational surface. Of course, this is false – by Theorem 9.3 if has genus then the ruled surface has and . Now we have , , and covered, one might conjecture that is sufficient to show that is birational to . Maybe surprisingly this is false (e.g., Enriques surfaces are not rational), however there is a cohomological criterion for rationality.
Theorem 9.12 (Castelnuovo’s rationality criterion).
A smooth projective surface with is rational.
I will not give a proof of this theorem (see [1, V.1]) however the following is my crude understanding of the proof. One of the central ingredients is the following fact.
Fact.
Let be as in the theorem, and suppose that is a rational curve with . Then is rational.
One should maybe think of saying that the curve can move among effective divisors in its linear equivalence class. The fact is then saying that if such a curve exists, then the cohomological facts are enough to sweep all across (hence giving a ruling). One then has the job of going into the weeds to find such a curve.
10. Enriques–Kodaira classification
A very sketchy description of the classification of algebraic surfaces follows.
Definition 10.1.
Let be a smooth projective surface then:
-
(1)
is said to be rational if it is birational to , and
-
(2)
is said to be ruled if it is birational to where is a curve.
Exercise 10.2.
Show that if is a ruled surface, then .
To classify surfaces, it is extremely useful to know that we only need to do biregular geometry (i.e., up to isomorphisms) as opposed to birational geometry (i.e., up to birational maps). To ensure this, we wish to work with a unique model in each birational equivalence class. This is ever-so-slightly too much to hope for, but if is not ruled we can get this, as we now see. A proof can be found in [1, Prop. 2.16 and Theorem V.19].
Definition 10.3.
We say that a smooth, projective surface is minimal if it contains no -curves. Equivalently, is minimal if and only if every birational map is an isomorphism.
Theorem 10.4 (Existence and uniqueness of minimal models).
If is a smooth, projective surface then there exists a dominant (i.e., surjective on -points) birational morphism where is minimal.
Moreover, if is not a ruled surface, then is unique and is obtained from by blowing down a finite number of -curves.
For the proof, just blow-down all the -curves (of course, there is more to show — it terminates, it terminates at something unique, etc).
10.1.
It is a theorem of Enriques that this case is entirely covered by ruled surfaces.
Theorem 10.5 (Enriques’ Theorem).
Let be a smooth projective surface. Then the following are equivalent:
-
(1)
,
-
(2)
for all ,
-
(3)
is a ruled surface.
Note that the (2)(3) case of Theorem 10.5 is closely related to Castelnuovo’s rationality criterion (a ruled surface with is rational).
10.2.
This case is really the guts of the classification. First we define some surfaces which we have been playing with a lot.
Definition 10.6.
Let be a smooth projective (algebraic) surface. We say that:
-
(1)
is is an (algebraic) K3 surface if and ,
-
(2)
is an Enriques surface if , , and ,
-
(3)
is a bi-elliptic surface if where and are elliptic curves and is a cyclic group acting by translations on and not by translations on .
-
(4)
is an abelian surface if (as complex manifolds) for some full-rank lattice .
Remark 10.7.
-
(1)
It may not be immediately obvious that Enriques surfaces actually exist.
-
(2)
Note that the condition on a bi-elliptic surface means that and in the latter cases .
-
(3)
An abelian surface can also be defined as an abelian variety of dimension . An abelian variety is a projective, algebraic group variety (i.e., a projective variety equipped with an identity and “inversion” and “multiplication” morphisms and doing the obvious things).
We can now state the Enriques–Kodaira classification in the Kodaira dimension case.
Theorem 10.8 (Enriques–Kodaira).
Let be a minimal smooth projective algebraic surface with . Then is either:
-
(1)
an algebraic K3 surface ( and ),
-
(2)
an Enriques surface ( and ),
-
(3)
a bi-elliptic surface ( and ), or
-
(4)
an abelian surface ( and ).
10.2.1. Examples of K3 surfaces
We have seen many K3 surfaces so far. The following exercise lists some of them.
Exercise 10.9.
Show that each of the following surfaces is a K3 surface.
-
(1)
A smooth quartic surface.
-
(2)
A complete intersection of a quadric and cubic in .
-
(3)
A complete intersection of quadrics in .
-
(4)
A double cover of ramified over a smooth curve of degree . (Hint: use that if is a finite morphism between smooth projective varieties and then where is the ramification locus of .)
10.2.2. Examples of Enriques surfaces
For Enriques surfaces, the construction is somewhat more involved, but there is a very useful proposition (see [1, Prop. VIII.17]).
Proposition 10.10.
Let be a K3 surface equipped with an involution (i.e., a map for which ). Then the quotient is a smooth projective algebraic surface and an Enriques surface. Moreover, every Enriques surface arises in this way.
Sketch proof.
Smoothness of the quotient follows since the action of has no “isolated” fixed points (indeed, it has no fixed points at all…).
Fact.
If is a finite morphism between smooth projective varieties and then where is the ramification locus of .
In our case, the fact says that . For any divisor on we have . Thus and noting that (since is a K3 surface) we have , as required. Now, since is étale we have . Because is a K3 surface and thus . In particular we must have , as required.
![[Uncaptioned image]](x16.png)
The idea for the converse is the “cyclic covering trick” which says that those with correspond exactly to étale double covers . ∎
10.2.3. Examples of abelian surfaces
There are only two ways to build an abelian surface. The first is to take a product of elliptic curves (it should be clear that this satisfies the definition). The second is a more involved construction called the Jacobian.
Proposition 10.11.
Let be a smooth projective curve of genus . Then there exists an algebraic variety of dimension such that we have an isomorphism as complex manifolds (and as groups). We call the Jacobian of .
By Proposition 10.11 the Jacobian of a genus curve is an abelian surface. One needs to work harder to show that all abelian surfaces are isomorphic to either a product of elliptic curves or a Jacobian.
Exercise 10.12.
Let be an abelian surface and let be the inversion map.
-
(1)
Show that the has exactly fixed points and deduce that the quotient has -singular points.
-
(2)
Show that there exists a surface which is non-singular and the exceptional divisor above each of the singular points is a -curve (i.e., a smooth rational curve with ). (Hint: extend the action of to the blowup of at its -torsion points.)
-
(3)
Show that is a K3 surface.
-
(4)
Let be a -torsion point on and let be the map . Show that induces a morphism on (and thus on ). Find out what you can about .
10.3.
We call any surface of Kodaira dimension a properly elliptic surface (or elliptic surface of Kodaira dimension ). The reason for this will be explained.
Exercise 10.13.
Show that if is a curve of genus then the surface is a properly elliptic surface.
Definition 10.14.
Let be a smooth projective curve. We say that a morphism is an elliptic fibration if the generic fibre of is a smooth curve of genus .
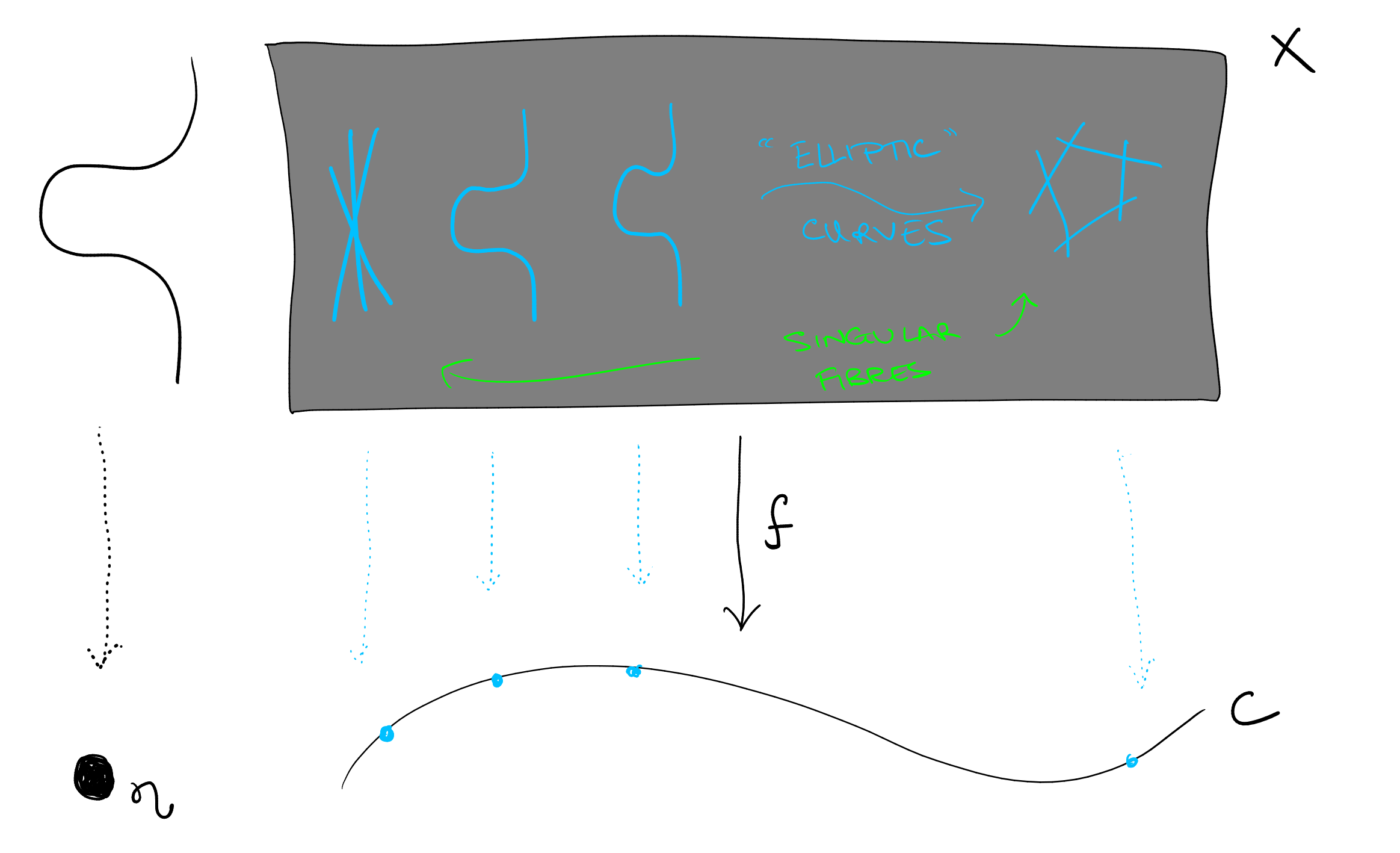
Remark 10.15.
Note that the above definition of an elliptic fibration does not require that there exists a -point on the generic fibre of . Some authors might therefore be inclined to call the above a genus fibration and declare it to be elliptic if there exists a section of .
Theorem 10.16.
Let be a smooth projective surface with . Then there exists a curve and an elliptic fibration .
Proof idea.
A complete proof is given in [1, IX].
From the definition of Kodaira dimension we know that there exists an integer such that the (Zariski closure of the) image of the rational map is a curve (here as defined in Section 9.2).
Assumption: is a morphism. (This can be avoided by breaking up the “fixed” and “mobile” parts of the linear system see [1, IX].)
One might hope that is the elliptic fibration we are looking for, but the fibres can be disconnected. Fortunately there is “Stein factorisation” which says there exists a curve and a factorisation where the first morphism has connected fibres (call it ). To conclude we first need a standard lemma.
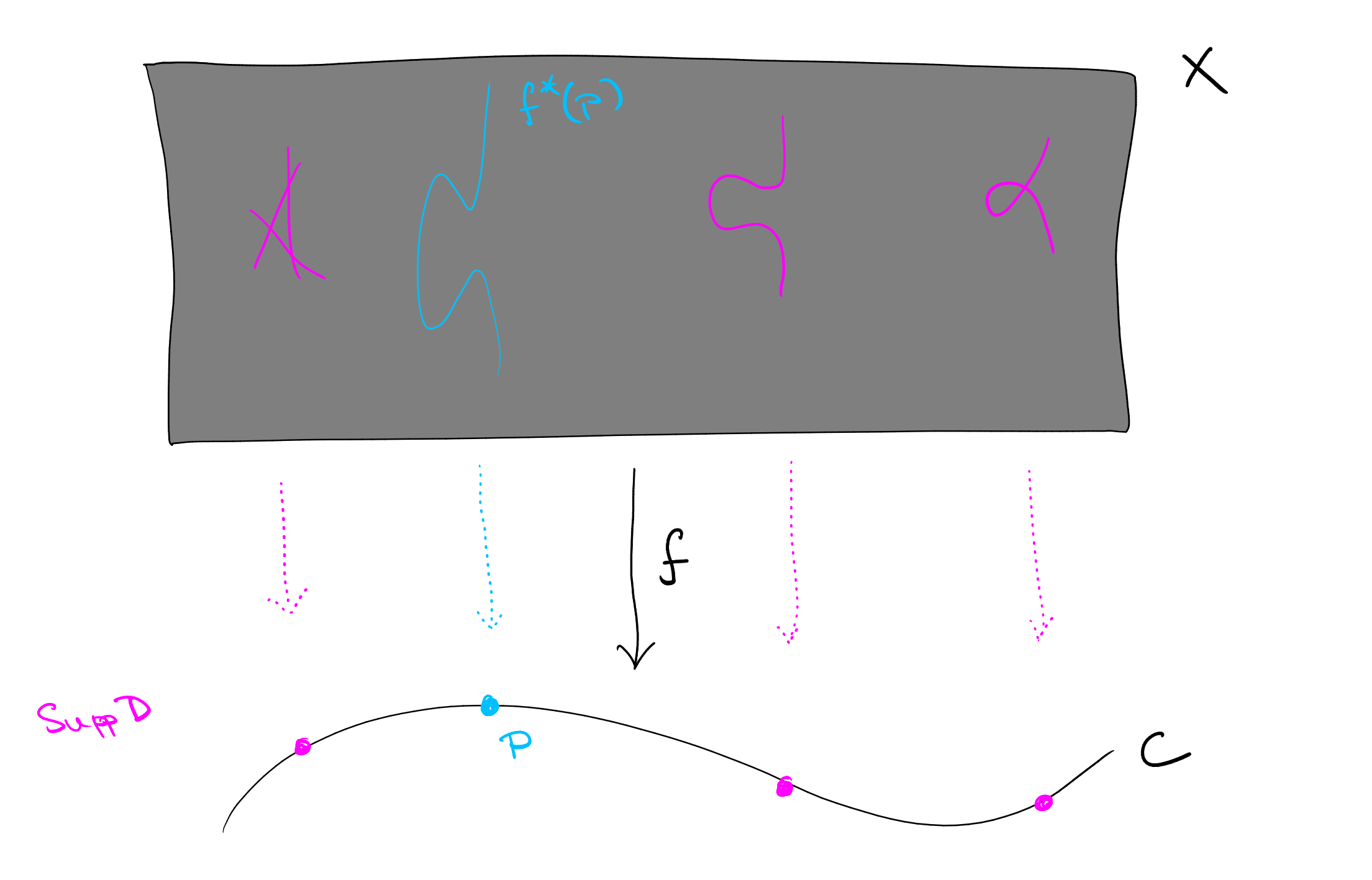
Lemma 10.17.
Let be a morphism ( a smooth projective surface and a smooth projective curve). If is a fibre of , then .
Proof.
Let be so that . By the moving lemma 5.3 there exists a divisor so that and the support of is disjoint from . Then and therefore (the fibre above does not meet for any point ). ∎
The final ingredient is the following useful proposition.
Proposition 10.18 ([1, Lemma IX.1]).
Suppose that is a smooth projective surface which is not ruled. Then
-
(1)
if then is of general type (i.e., ), and
-
(2)
if is minimal and not of general type then .
Now, let be a general fibre of (i.e., if it is singular, re-choose it). By construction we have (without our assumption that is a morphism, as is the case in in [1, IX], one has where is the “mobile part” of ). By the genus formula (Theorem 6.8) we have
by Proposition 10.18(2) (and the assumption that is minimal). The conclusion follows. ∎
Exercise 10.19.
Construct a rational elliptic surface, an elliptic K3 surface, and a properly elliptic surface.
Exercise 10.20 (Hard?).
Let be homogeneous polynomials of degree and respectively. Consider the affine surface in given111For subtleties see [6, Remark III.3.1]. by
Suppose that . Let be a smooth projective surface birational to .
-
(1)
Show that admits an elliptic fibration .
-
(2)
Suppose that is -power free. Show that is:
-
(i)
a rational surface if ,
-
(ii)
a (blown-up) K3 surface if , and
-
(iii)
a properly elliptic surface if .
-
(i)
10.4.
We simply define any surface with to be of general type. Examples are given in Exercise 9.10. At least we know the following.
Proposition 10.21 ([1, Lemma IX.1]).
Suppose that is a smooth projective surface which is not ruled. If then is of general type.
10.5. A table
The following table represents the Enriques–Kodaira classification, as described above.
| Name | |||
| Rational | |||
| Ruled (not rational) | |||
| K3 | |||
| Enriques | |||
| Bi-elliptic | |||
| Abelian | |||
| Properly elliptic | |||
| General type |
10.6. A very brief note on the proof
I will conclude with the briefest of notes on how one proves the Enriques–Kodaira classification (in particular Theorems 10.5 and 10.8). As you can may notice, much of the work lies in the Kodaira dimension case. Unfortunately, the morphism provided by the definition of Kodaira dimension does not carry nearly as much information as it does in the case. One instead needs an object associated to a different cohomological invariant. A central tool is the Albanese variety.
Definition 10.22.
Let be a smooth projective variety. The Albanese variety of is a pair where is an abelian variety and is a morphism with the property that for any abelian variety and morphism , there exists a unique factorisation
The Albanese generalises the Jacobian of a curve (which plays a crucial role in the theory of curves). Importantly, the Albanese exists.
Theorem 10.23 ([1, Theorem V.13]).
Let be a smooth projective variety. The Albanese variety of exists and the morphism is unique up to translation on the target.
A crucial property of the Albanese is that the morphism induces an isomorphism and therefore .
References
- [1] (1996) Complex algebraic surfaces. Second edition, London Mathematical Society Student Texts, Vol. 34, Cambridge University Press, Cambridge. Note: Translated from the 1978 French original by R. Barlow, with assistance from N. I. Shepherd-Barron and M. Reid External Links: Document, Link, MathReview Entry Cited by: §10.2.2, §10.3, §10.3, §10.3, Proposition 10.18, Proposition 10.21, Theorem 10.23, §10, §6, §7.1, §7.2, §7, §8.1, Exercise 8.4, §9.3, §9.
- [2] (1977) Algebraic geometry. Graduate Texts in Mathematics, Vol. No. 52, Springer-Verlag, New York-Heidelberg. External Links: ISBN 0-387-90244-9, Link, MathReview (Robert Speiser) Cited by: Figure 4, §8.1.
- [3] (2002) Algebraic geometry and arithmetic curves. Oxford Graduate Texts in Mathematics, Vol. 6, Oxford University Press, Oxford. Note: Translated from the French by Reinie Erné, Oxford Science Publications External Links: ISBN 0-19-850284-2, MathReview (Cícero Carvalho) Cited by: §5.1, Remark 5.4.
- [4] (1997) Chapters on algebraic surfaces. In Complex algebraic geometry (Park City, UT, 1993), IAS/Park City Math. Ser., Vol. 3, pp. 3–159. External Links: ISBN 0-8218-0432-4, Document, Link, MathReview (Mark Gross) Cited by: §4, §6.
- [5] (1994) Basic algebraic geometry. 1. Second edition, Springer-Verlag, Berlin. Note: Varieties in projective space External Links: ISBN 3-540-54812-2, MathReview Entry Cited by: §2.1.
- [6] (1994) Advanced topics in the arithmetic of elliptic curves. Graduate Texts in Mathematics, Vol. 151, Springer-Verlag, New York. External Links: Document, ISBN 0-387-94328-5, Link, MathReview (Henri Darmon) Cited by: footnote 1.
- [7] (2009) The arithmetic of elliptic curves. Second edition, Graduate Texts in Mathematics, Vol. 106, Springer, Dordrecht. External Links: Document, ISBN 978-0-387-09493-9, Link, MathReview (Vasilʹ Ī. Andrīĭchuk) Cited by: §3.1.
- [8] (2022) The stacks project. Note: https://stacks.math.columbia.edu Cited by: Remark 5.4, §9.1.